“模型”驶向未来,首个多视图预测+规划自动驾驶世界模型来了
今天,很高兴为大家分享来自机器之心Pro的驶向未来,首个多视图预测+规划自动驾驶世界模型来了,如果您对驶向未来,首个多视图预测+规划自动驾驶世界模型来了感兴趣,请往下看。
Drive-WM 模型通过多视图世界模型,能够想象不同规划路线的未来情景,并根据视觉预测获取相应的奖惩反馈,从而优化当前的路线选择,为自动驾驶系统的安全提供了保障。
近期,世界模型的概念引发了火热浪潮,而自动驾驶领域岂能隔岸观「火」。来自中科院自动化所的团队,首次提出了一种名为 Drive-WM 的全新多视图世界模型,旨在增强端到端自动驾驶规划的安全性。

网站:https://drive-wm.github.io
论文链接:https://arxiv.org/abs/2311.17918
首个多视图预测和规划的自动驾驶世界模型
在 CVPR2023 自动驾驶的研讨会上,特斯拉和 Wayve 两大科技巨头狂秀黑科技,一种名为「生成式世界模型」的全新概念随之火爆自动驾驶领域。Wayve 更是发布了 GAIA-1 的生成式 AI 模型,展示了令人震撼的视频场景生成能力。而最近,中科院自动化所的研究者们也提出了一个新的自动驾驶世界模型 ——Drive-WM,首次实现了多视图预测的世界模型,与当下主流的端到端自动驾驶规划器无缝结合。
Drive-WM 利用了 Diffusion 模型的强大生成能力,能够生成逼真的视频场景。
想象一下,你正在开车,而你的车载系统正在根据你的驾驶习惯和路况预测未来的发展,并生成相应的视觉反馈来指导轨迹路线的选择。这种预见未来的能力和规划器相结合,将极大地提高自动驾驶的安全性!




世界模型与端到端自动驾驶的结合提升驾驶安全性
Drive-WM 模型首次将世界模型与端到端规划相结合,为端到端自动驾驶的发展打开了新的篇章。在每个时间步上,规划器可以借助世界模型预测未来可能发生的情景,再利用图像奖励函数全面评估。

选择最优估计,扩展规划树,实现更安全、有效的规划。





Drive-WM 开创性地探索了世界模型在端到端规划中的两种应用:
1. 展示了世界模型在面对 OOD 场景时的鲁棒性。作者通过对比实验发现了目前的端到端规划器在面对 OOD 情况时的表现并不理想。
作者给出了以下图片,当对初始位置进行轻微的横向偏移扰动后,目前的端到端规划器就难以输出合理的规划路线。

Drive-WM 的强大生成能力为解决 OOD 问题提供了新的思路。作者利用生成的视频来微调规划器,从 OOD 数据中进行学习,使得规划器在面对这样的场景时可以拥有更好的性能。
2. 揭示了引入未来场景评估对于端到端规划的提升作用

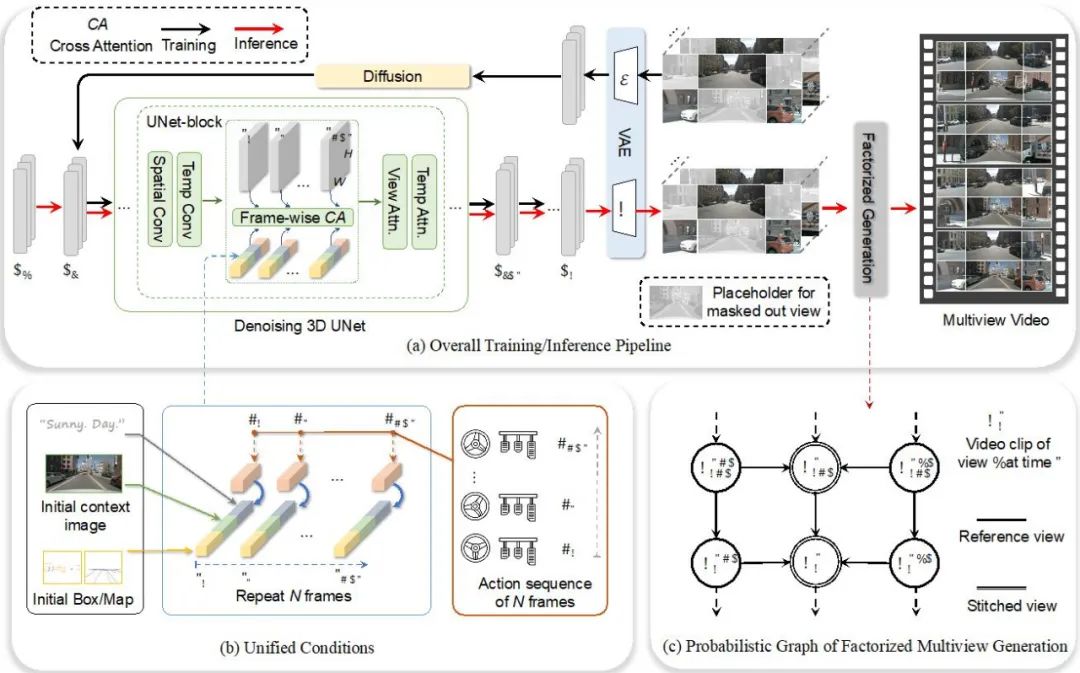
如何构建多视图的视频生成模型
多视图视频生成的时空一致性一直以来都是一个具有挑战性的问题。Drive-WM 通过引入时序层的编码来扩展视频生成的能力,并通过视图分解建模的方式实现多视图的视频生成。这种视图分解的生成方式可以极大地提升视图之间的一致性。
高质量的视频生成与可控性
Drive-WM 不仅实现了高质量的多视图视频生成,而且具有出色的可控性。Drive-WM 还提供了多种控制选项,可以通过文本、场景布局、运动信息来控制多视图视频的生成,也为将来的神经仿真器提供了新的可能性。

比如使用文本来改变天气和光照:




比如行人的生成和前景的编辑:


利用速度和方向的控制:


稀有事件的生成,例如路口掉头和开进侧方草丛:

结语
Drive-WM 不仅展示了其强大的多视图视频生成能力,也揭示了世界模型与端到端驾驶模型相结合的巨大潜力。相信在未来,世界模型可以帮助实现更安全、稳定、可靠的端到端自动驾驶系统。
好了,关于驶向未来,首个多视图预测+规划自动驾驶世界模型来了就讲到这。
版权及免责声明:凡本网所属版权作品,转载时须获得授权并注明来源“科技金融网”,违者本网将保留追究其相关法律责任的权力。凡转载文章,不代表本网观点和立场,如有侵权,请联系我们删除。
相关文章
- “模型”驶向未来,首个多视图预测+规划自动驾驶世界模型来了
- “等离子体”《自然》(20231130出版)一周论文导读
- “红星”当年轻人成为学缝纫的主力:享受乐趣,顺便接单,还有宝妈为全家做衣服
- “标书”3年未中的国自然标书, 成了“基金工厂”的典范案例
- “盖茨”投入2亿美元,盖茨基金会与阿联酋共助南亚等地区小农户应对极端天气
- “艾滋病”东平保法医院开展世界艾滋病日宣传活动
- “洛克”美军方向太空发射核反应堆,合作公司此前发声:计划设计核动力航天器
- “资本”汇添富基金董超:资本周期视角下的投资思考
- “洗碗机”给方太董事长茅忠群提个醒:大力押宝洗碗机是否值得?
- “青海”青海联通赋能产业“四地”建设高质量发展 奋力绘就数字时代新画卷
- “模型”Meta教你5步学会用Llama2:我见过最简单的大模型教学
- “模型”百度刘军伟:大模型技术为医疗产业注入新引擎
- “鸿蒙”一克商评丨价格战会成为一种常态,但不代表所有的产品都需要低价
- “模型”720亿、千亿级参数大模型接连开放 国产开源大模型进入参数时代
- “模型”百度何俊杰:AI原生应用将成创新增长的“弹簧板”
- “模型”联想王传东:AI PC将成为开启大模型时代第一终端的重要角色
- “人工智能”AI一天,人间一年:如何抓住人工智能的未来趋势?
- “人工智能”大模型引爆AI算力市场 2023年中国智算规模有望同比增长近六成
- “商汤”新华社研究院:商汤“商量”获评中国大模型市场未来领袖
- “世界遗产”《四川省世界遗产保护条例(修订草案)》提请审议,拟调整世界遗产主管部门