“材料”中国科学家研发三维力学超材料,不仅覆盖零模式到六模式,还能实现构型之间的可逆转换
今天,很高兴为大家分享来自DeepTech深科技的中国科学家研发三维力学超材料,不仅覆盖零模式到六模式,还能实现构型之间的可逆转换,如果您对中国科学家研发三维力学超材料,不仅覆盖零模式到六模式,还能实现构型之间的可逆转换感兴趣,请往下看。
来源:DeepTech深科技
21 世纪伊始,英国物理学家约翰·彭德里(John B.Pendry)提出了拥有负折射率的电磁超材料,自此掀起了超材料研究的旋风。
此后二十年间,关于超材料的研究逐渐扩展到光学、声学、热学、力学等多个领域,并发展成一个涵盖物理学、通信、材料、数学、力学、机械等多学科的的交叉型研究领域,同时也把功能材料的设计和开发带入一个全新境地,引发了信息技术、国防工业、微细加工技术等领域的重大变革。
美国国防部已将超材料列为“六大颠覆性基础研究领域”之一,中国也已将其列入《“十三五”国家战略性新兴产业发展规划》。对于超材料的研究,已经成为全球学界激烈竞争的热门前沿科技之一。

机械超材料:超材料在力学领域的拓展
作为超材料在力学领域的拓展,机械超材料由人工设计的亚波长微结构所构成,它可以极大扩展材料的力学属性选择空间。
机械超材料具备天然材料所不具备的超常规的力学属性:比如负泊松比、极端模量、强度等静态属性,以及负等效密度、负等效模量、负折射率等动态属性。
其中,机械超材料的动态属性,让声波和弹性波传播的精确操控成为可能。
随着机械超材料的迅速发展和工程需求的日益提高,可编程、可调控的机械超材料成为人们追求的目标。
此外,模块化折纸等柔性结构,也为超材料带来了大变形可重构特性、以及零能量变形模式。零能量变形模式,指的是材料或结构几乎不消耗能量的一种变形模式,水的流动便是这种模式的典型代表。
在零能量变形模式中,最引人注目的应用当属五模式超材料,它能被用于设计声学“隐身”斗篷。
所谓五模,指的是这种弹性介质在满足弹性刚度矩阵的 6 个特征值中,其中有 5 个特征值为零,因此只能承载静水压载荷。简单来说,就是五模式超材料具备“流体”的性质。
近年来,有关五模超材料的声学性质和潜在应用,已被得到广泛研究。自然而然地,科学家们也开始思考:在其他模式的材料里,是否存在更新奇的波动现象?
要回答这一问题,首先要提出模式材料的设计方法。基于此,天津大学陈焱教授和团队希望寻找一个包含所有模式材料的设计体系,从而实现零模、一模、二模、三模、四模、五模、直至六模超材料的可逆转换。
 图 | 陈焱(来源:陈焱)
图 | 陈焱(来源:陈焱)
一场跨越天津和北京的合作
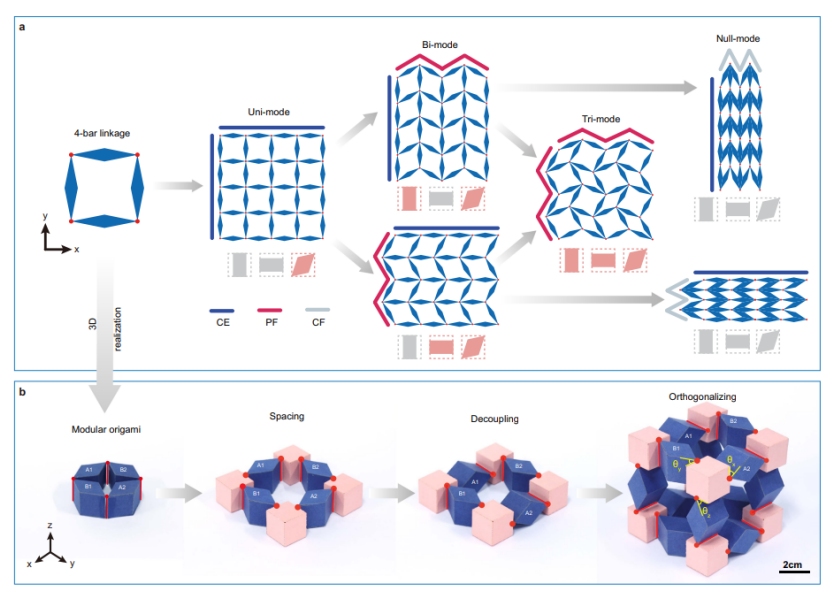
在近期一项工作中,她和合作者以模块化折纸作为设计工具,从最简单的平面四连杆机构出发,设计了三维正交运动、自由度解耦的机构胞元。
其中,对于正交方向上的模式数目,可以通过连杆的展开和折叠来进行解耦控制。
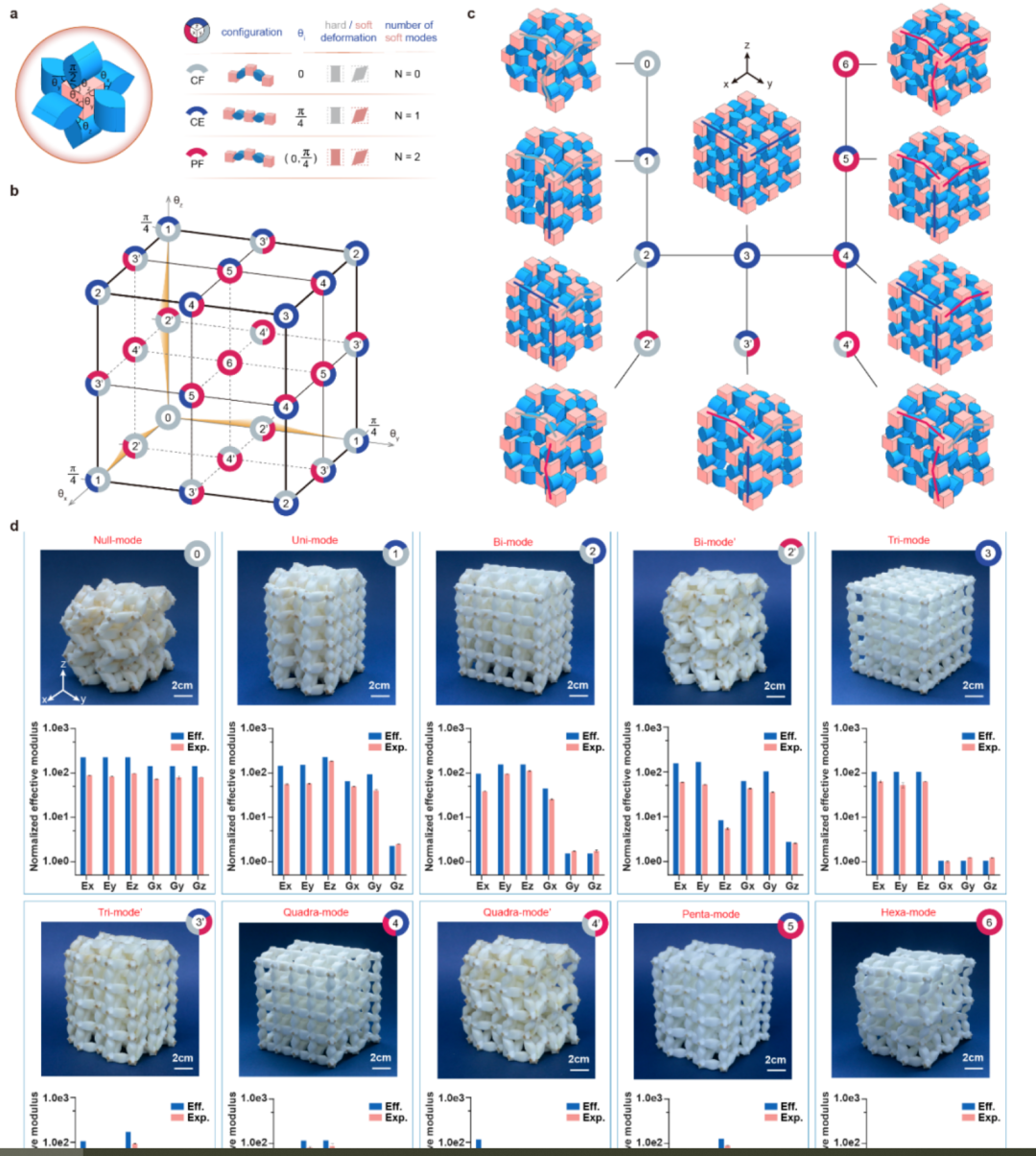
基于此,课题组提出了一种新的变构型超材料。借助本次研究,该团队在二维空间和三维空间中完成了所有模式数的覆盖,并通过 3D 打印热塑性聚氨酯材料的方式获得了样品材料,也成功验证了多种参数配置下超材料的静力学特征。
例如,在三模构型之下,超材料只能承载来自三个正交方向的压缩载荷,并不具备承受剪切的能力;
而在变换到五模构型之后,超材料只能承载来自单个方向的压缩载荷,无法承载剪切加载和其余方向的压缩加载。
这种奇特的静力学响应特性,说明这种超材料具备可定制弹性张量的属性。而在弹性波的控制上,它也能表现出一系列非常规的动态性能。
这样带来的好处是:在三维解耦设计的框架之下,课题组得以利用不同方向的组合,来实现更复杂的波导和波极化控制。
在应用前景上:
首先,这种变构型模式超材料可被用于弹性波的三维极化控制,从而创建类似于电子拓扑绝缘体的机械波拓扑态;
其次,通过对其线性特性的重编程、以及非线性特性的可逆切换,可以造出多功能的波动器件,从而用于水下通信、无损检测和医学成像等领域。
可以说,本次成果是可编程变构型设计在声学超材料领域的一次探索,也为这种设计在电磁学、光学等领域的应用提供了参考。
据陈焱介绍,在持续二十年的发展中,超材料经过了从二维电磁超表面到三维的机械、热学、声学、光学超材料的发展历程。
如今,针对超材料的设计,已经从定性设计进入可编程、可调控定量设计的阶段。对于超材料的物理性能调控来说,也面临着愈加丰富的需求和挑战。
不过学界早已找到应对的方案——机构胞元。凭借多样性的运动路径、以及大变形的特点,机构胞元为大变形的超材料带来了新的设计途径。
多年来,陈焱课题组深耕于基础机构学理论的探索,并将其实践于折展结构的研究中。
2015 年,陈焱团队提出了全新的厚板折纸理论模型,破解了“厚板结构难以折叠”这一困扰学界和业界长达五十余年的难题,借此成为第一支在 Science 发表相关论文的来自机构学领域的课题组。
此后,陈焱实验室又从机构领域延伸到结构领域,提出了基于折纸的新型轻质结构与大变形超材料设计理论,借此获得了一系列超材料,它们均拥有负泊松比、可调刚度等特性。
另一方面,北京理工大学的胡更开教授和朱睿教授的课题组,长期从事力学超材料设计与波动力学研究。2014 年,朱睿利用力学超材料实现了亚波长尺度下弹性波的负折射。
 图 | 朱睿(来源:朱睿)
图 | 朱睿(来源:朱睿)作为同行的陈焱也关注到:近年来,面对现代工程装备材料设计中亟需解决的高效波动能量耗散与调控难题,北京理工大学团队与多家顶尖研究所合作,为航天结构微振动控制、水下低频隔声、管路系统减振降噪等难题,提供了诸多原创性解决方案。
于是在一次学术交流活动之后,陈焱和朱睿决定联合开展一项关于折纸结构和模式材料相结合的研究。
具体来说,2019 年,胡更开和朱睿邀请陈焱到访北京理工大学宇航学院开展学术分享。交流中,陈焱介绍了基于折纸的超材料研究方法和成果。
这次交流为两支团队的后续合作创造了契机。不久之后,朱睿来到天津大学可动结构实验室进行学术分享,期间他展示了关于五模超材料的成果,并指出模式超材料的微结构系统设计方法是当前面临的一个巨大挑战。
结合之前的研究经验,陈焱意识到模式超材料的软模式与机构的零能量运动模式有着某种共通之处,而将机构引入模式超材料的微结构设计中,有望解决模式超材料的系统设计问题。
陈焱说:“当时我展示了一个灵巧变形的模块化折纸结构,引起了朱老师极大的兴趣,直觉告诉他这种结构就是一种模式超材料,而且具有构型可变的能力。”
于是,陈焱和朱睿随即安排两位学生(即本次论文的两位共同一作),以这一结构为载体开展研究。

针对二维模式超材料,提出新型设计方案
立项以后,他们先是开展了关于二维模式超材料设计的研究。其中,一种简单的平面四杆机构给课题组带来了灵感,基于此他们提出了以平面四杆机构为基本胞元的机械超材料设计方案。
结合均匀化的理论知识,他们对上述方案做以分析。结果发现:通过改变胞元的折展状态,可以实现从零模到一模、二模甚至三模超材料之间的任意转换。通过此,该团队提出了针对二维模式超材料的设计方案。
然而,对于三维模式超材料的设计,远比二维模式超材料的设计来得复杂。
研究中,他们将二维模式超材料沿面外进行拉伸,结果发现它的机构自由度会被约束在面内。
而要想得到能够覆盖从零模到六模等七种模式超材料的设计,就得在胞元中引入基于机构自由度的空间解耦。
于是,该团队构建出一个空间解耦的三维立方胞元,并利用均匀化方法验证了这种设计的“本领”:即它确实能造出覆盖从零模、到六模等七种模式超材料的机械超材料。
 (来源:Nature Communications)
(来源:Nature Communications)光有“本领”并不足够,还得具备可靠性。为此,他们利用 3D 打印技术制备出一个三模超材料样品。
但是,他们发现打印完成的初版模型,在正交方向上存在明显的各向异性。后来,课题组沿着立方体样品的体对角线,采取逐层打印的方式,基本彻底消除了各向异性。
另外,要想实现七种模式超材料之间的任意转换,必须选用热塑性聚氨酯基体材料,而这也是实现材料重构的关键。
力学实验结果也表明,这种系统设计方法的确具有可靠性,并能为这种机械超材料带来可重构的特性。
 (来源:Nature Communications)
(来源:Nature Communications)据介绍,超材料的特殊物理性能一般取决于其内部人工结构的拓扑和变形特征,而基础材料的本征特性并不能起到决定性作用。
基于超材料的这一特性,后续可以将新型智能材料引入这种构型可变机械超材料的柔性连接处。
在外部刺激作用之下,智能材料会产生变形响应,从而改变超材料的构型,进而实现智能可调的机械超材料。
在此基础之上,还可以进一步设计多功能的波动器件,通过外场的实时编程,拓展超材料对于声波或弹性波的实时调控能力。
此外,陈焱等人本次提出的五模材料,与常规五模超材料的承载模式并不相同,因此暂不具备声学隐身的能力。
所以,陈焱的下一个目标是:在折纸的框架下,提出一种关于模块化结构的新型设计方案,以期造出承载模式为静水压载荷的五模式超材料。
 参考资料:
参考资料:1.Hu, Z., Wei, Z., Wang, K.et al. Engineering zero modes in transformable mechanical metamaterials. Nat Commun 14, 1266 (2023).
https://doi.org/10.1038/s41467-023-36975-2
陈焱. 基于机构运动的大变形超材料. 机械工程学报, 56(19), 2-13, 2020. DOI:10.3901/JME.2020.19.002
好了,关于中国科学家研发三维力学超材料,不仅覆盖零模式到六模式,还能实现构型之间的可逆转换就讲到这。
版权及免责声明:凡本网所属版权作品,转载时须获得授权并注明来源“科技金融网”,违者本网将保留追究其相关法律责任的权力。凡转载文章,不代表本网观点和立场,如有侵权,请联系我们删除。
相关文章
- “铜陵”化工厂爆炸?两名造谣者被查处
- “爷爷”爷爷的石榴树
- “陈老”高山仰止,景行行止 ——读春桃老师所著《国医》
- “知网”中国知网用户委员会两名成员公开亮相
- “宜宾”近2万人参加!2023宜宾长江马拉松开跑:埃塞俄比亚选手包揽全马组男女前三名
- “鲁南”鲁南制药集团建厂55周年:“向新向未来”
- “民谣”玉林民谣,从成都走向深圳
- “亿元”爱仕达董事长陈合林做铁锅起家 公司已连续亏损两年多他有啥招术?
- “营收”“酱油一哥”黯然失色!市值蒸发超5000亿,海天味业遭转型阵痛
- “可持续”“京澳25”公益计划启航
- “新材料”信金控股完成新一期人民币基金首关
- “壁画”为延续壁画“生命” 可拆可移方法亟需突破
- “纳米”张铁锐获第二届纳米材料科学青年科学家奖
- “衬底”低维单晶材料制造研究获重要进展
- “纳米”科学家研发纳米酶筛选策略,将大数据成功用于药物材料筛选,已开始临床前测试
- “美国”西湖大学教授杨健获BMES医疗创新奖
- “青少年”买“会员”就可绕过“青少年模式” 不法App被判赔偿
- “中国科学院”王友绍当选2023国际先进材料协会会士
- “医疗”「固源医疗」获数千万元Pre-A轮融资,加速医用新材料技术升级|早起看早期
- “机器人”字节高管再创业,人形机器人公司「加速进化」完成数千万天使轮融资|早起看早期









